Программа управления траекторией движения автономного транспортного средства на основе распознавания лазерных световых маркеров
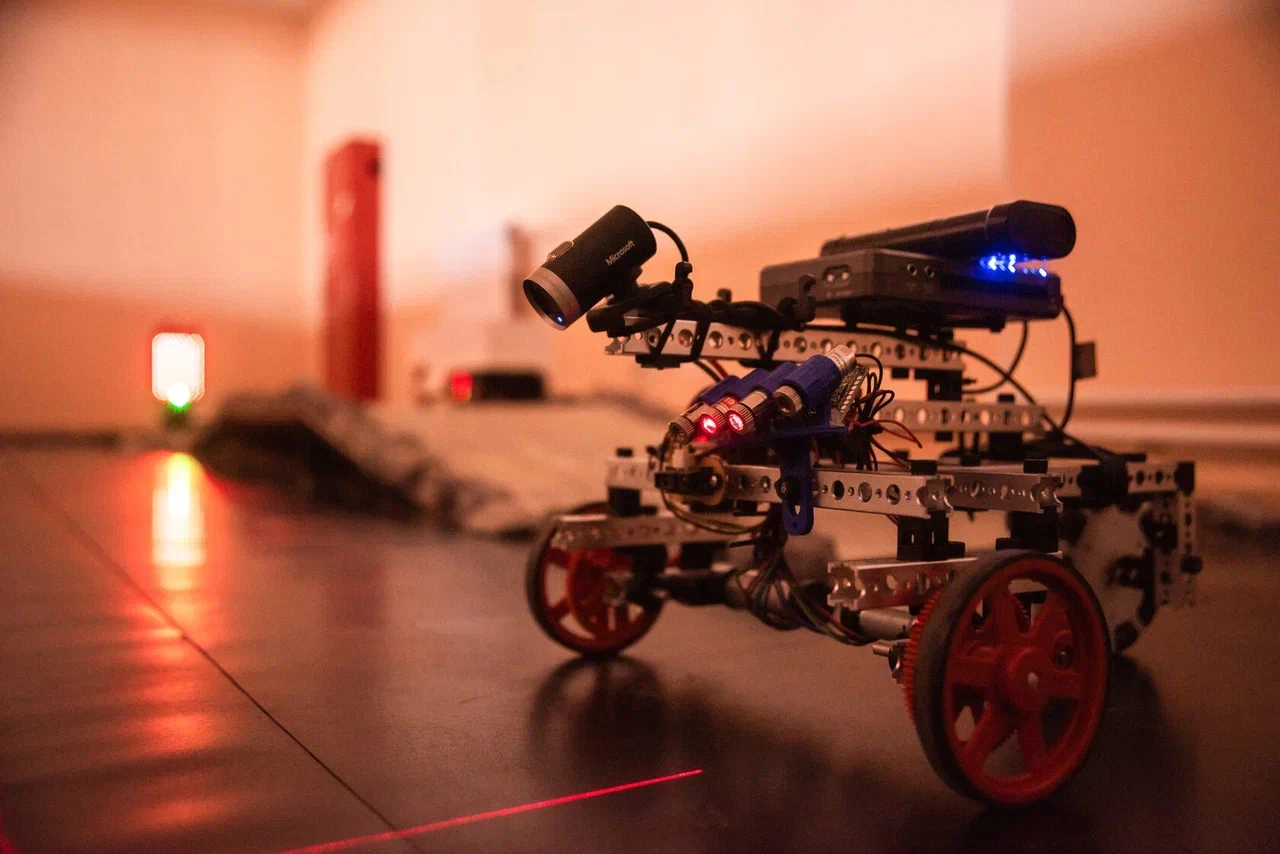
назадИнтерфейс предназначен для управления движением автономного транспортного средства с помощью машинного зрения для распознавания лазерных маркеров. Моделирует управление в реальном времени и проецирует траектории с тремя типами маркеров: лазерная прямая, пересечение линий и измерение расстояний для определения направления поворота.
Заказчик: АО ХК «СДС-Уголь», АО «УК «Кузбассразрезуголь», НИИ КПССЗ
Исполнитель: ФИЦ УУХ СО РАН